FIND3D:加州理工学院开发的3D部分分割模型
FIND3D简介
FIND3D是由加州理工学院开发的一种先进的3D部分分割模型,它能够在无需人工标注的情况下,通过文本提示自动分割任何对象的任何部分。该模型结合了一个由2D基础模型驱动的数据引擎和对比训练方法,能够处理多样化的3D对象和部分查询,展现出卓越的性能和泛化能力。FIND3D在多个数据集上实现了高达3倍的mIoU提升,并且比现有方法快6倍至300倍以上,为3D对象理解和交互应用开辟了新的可能性。
FIND3D主要功能
- 开放世界3D部分分割:能够根据任何文本查询,对任何对象的任何部分进行分割。
- 零样本学习:无需针对特定对象类别的训练,即可在未见过的类别上进行分割。
- 高性能推理:相比于现有方法,推理速度快6倍至300倍以上。
- 泛化能力:在多个数据集上展现出超过3倍的mIoU提升,包括对未见类别的强泛化能力。
- 处理多样化查询:支持灵活的文本查询,包括不同粒度和描述类型。
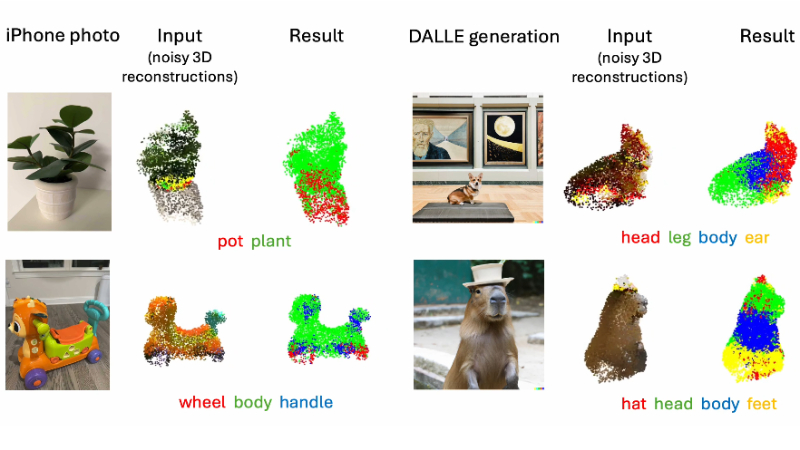
- 3D重建应用:能够处理来自现实世界图像(如iPhone照片)和AI生成图像的3D重建。
FIND3D技术原理
- 数据引擎:利用2D视觉和语言基础模型(如SAM和Gemini)自动从网上标注3D资产。
- 点云模型:训练一个基于变换器的点云模型,输入点云并预测每个点的可查询语义特征。
- 对比训练方法:使用对比学习目标处理部分层次和歧义,提高模型的泛化能力。
- 点变换器架构:采用PointTransformer3架构,将点云序列化并通过变换器网络进行处理。
- 序列化和反序列化:通过空间填充曲线等方法对点云进行序列化和反序列化,以适应变换器架构。
- 条件位置编码:为点云中的每个点添加条件位置编码,以保留空间信息。
- 块注意力和池化:在编码器中应用块注意力和池化,以扩大感受野并处理任意长度的点序列。
- MLP头:使用轻量级多层感知机(MLP)将点特征对齐到预训练模型(如SigLIP)的潜在嵌入空间。
- 多数据增强:应用包括随机旋转、缩放、翻转等数据增强技术,提高模型对不同姿态和颜色的鲁棒性。
FIND3D应用场景
- 机器人操控:在自动化和机器人技术中,FIND3D可以帮助机器人识别和理解3D物体的具体部分,以实现更精确的操控和交互。
- 虚拟现实(VR)和增强现实(AR):在VR和AR应用中,FIND3D能够提供对3D对象的深入理解,增强用户体验,例如在虚拟环境中进行物体的精确选择和操作。
- 3D打印:在3D打印领域,FIND3D可以用于识别和分割复杂的3D模型,以便进行特定的修改或优化打印过程。
- 自动驾驶汽车:FIND3D能够辅助自动驾驶系统更好地理解周围环境,如识别行人、车辆和道路标志的具体部分,提高安全性。
- 工业检测:在制造业中,FIND3D可以用于自动化质量检测,通过识别产品的具体部分来检测缺陷或不一致性。
- 医疗成像:在医疗领域,FIND3D可以帮助从CT或MRI扫描中分割和识别人体结构,辅助诊断和手术规划。
FIND3D项目入口
© 版权声明
文章版权归作者所有,未经允许请勿转载。

相关文章
暂无评论...










一站式AI信息服务平台:AI工具大全、AI每日快讯、AI项目库、AI融资快报、AI研究报告、AI教程、AI副业、AI考证等。助您全面系统了解AI、使用AI


 粤公网安备44011102483711号
粤公网安备44011102483711号