EnerVerse:智元机器人团队推出的首个机器人4D世界模型
EnerVerse简介
EnerVerse是由智元机器人团队推出的首个机器人4D世界模型,旨在为机器人操纵任务生成具身未来空间。该框架通过块状自回归扩散模型和自由锚视图(FAV)空间,有效解决机器人在复杂三维环境中的运动建模歧义和物理约束问题,提升其在多任务和多样化场景中的泛化与适应能力。同时,EnerVerse还构建了数据引擎管道,结合生成模型与4D高斯溅射技术,缩小仿真与现实之间的差距,为机器人学领域提供高质量合成数据,减少对昂贵现实世界数据收集的依赖,推动机器人在长范围操纵任务中的性能达到新高度,为机器人技术的广泛应用和发展奠定了坚实基础。
EnerVerse主要功能
- 生成具身未来空间:为机器人操纵任务预测和生成未来空间,使其能够提前感知和规划动作,提升任务执行的准确性和效率.
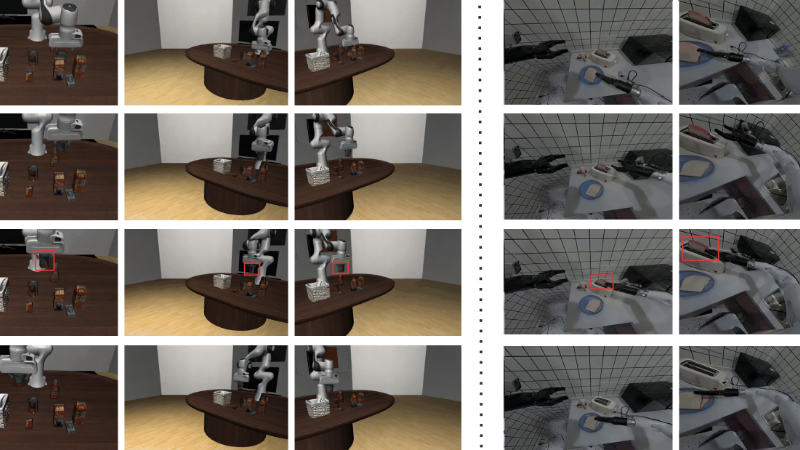
- 多视图视频生成:能够生成高质量且在不同视图间保持一致性的多视图视频,为机器人提供更全面的场景信息,增强其对环境的理解和决策能力.
- 缩小仿真与现实差距:通过数据引擎管道生成高质量合成数据,减少对现实世界数据的依赖,使机器人在仿真环境中训练得到的策略和技能能够更好地迁移到现实世界中.
- 提升机器人策略性能:与策略头集成后,能够生成执行任务所需的机器人动作,显著提高机器人在长范围操纵任务中的策略性能,增强其在复杂任务中的表现.
- 增强空间推理能力:利用自由锚视图空间,提供灵活的视角,减少运动建模歧义,增强机器人对三维空间的推理能力,使其能够更精确地理解和操作物理对象.
EnerVerse技术原理
- 块状自回归扩散模型:
- 卷积与双向注意力结合:在块空间建模中,采用卷积和双向注意力机制,确保低层次的一致性和连续性,捕捉未来空间的细节信息.
- 稀疏上下文记忆机制:设计稀疏记忆上下文,在生成过程中以非冗余方式保留先前内容,理论上可生成无限长的序列,提高模型的推理能力和对长序列数据的处理效率.
- 自由锚视图(FAV)空间:
- 灵活视角配置:FAV空间相对于机器人基座系统定义,可以任意配置和调整,不受物理位置限制,提供多样化的观察角度,增强对环境的观察和分析能力.
- 多视图一致性:通过在生成过程中考虑不同视图的视角信息,确保生成的多视图视频在各个视图间保持一致性,准确捕捉三维空间中的物体形状、位置和遮挡关系.
- 数据引擎管道:
- 生成模型与4D高斯溅射结合:将生成模型的泛化能力与4D高斯溅射提供的空间约束相结合,通过迭代优化生成高质量的多视图视频序列,实现数据的自我增强和质量提升.
- 数据飞轮效应:利用生成的高质量合成数据,不断迭代优化模型性能,形成自我强化的循环过程,缩小仿真与现实之间的差距,提高模型在现实世界中的适用性和有效性.
EnerVerse应用场景
- 工业自动化:在制造工厂中,EnerVerse可以用于机器人装配线上的复杂装配任务,如精准地将零部件组装到产品上,提高生产效率和产品质量.
- 物流仓储:在物流仓库中,机器人可以利用EnerVerse生成的未来空间信息,高效地进行货物分拣、搬运和堆叠,优化仓储空间利用率.
- 服务机器人:在餐饮、零售等服务行业,EnerVerse能够帮助服务机器人更好地理解顾客需求,提供精准的物品递送和环境清洁等服务.
- 医疗辅助:在医疗手术中,EnerVerse可以辅助手术机器人进行复杂的手术操作,如精准地切割、缝合组织等,提高手术的安全性和成功率.
- 家庭自动化:在智能家居环境中,EnerVerse使家庭服务机器人能够更好地适应家庭环境变化,完成家务任务,如整理物品、清洁房间等.
- 教育与培训:在机器人教育和培训领域,EnerVerse可以用于开发虚拟仿真环境,帮助学生和研究人员学习和研究机器人操纵技术,培养相关专业人才.
EnerVerse项目入口
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章
暂无评论...










一站式AI信息服务平台:AI工具大全、AI每日快讯、AI项目库、AI融资快报、AI研究报告、AI教程、AI副业、AI考证等。助您全面系统了解AI、使用AI


 粤公网安备44011102483711号
粤公网安备44011102483711号