DepthMaster:在保持高性能的同时显著提高了推理效率
DepthMaster简介
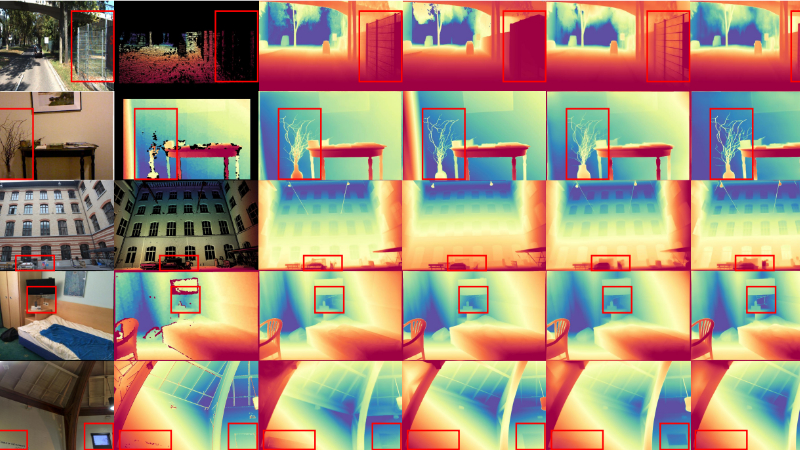
DepthMaster是由中国科学技术大学信息科学与技术学院和vivo移动通信有限公司的研究团队共同开发的一种单目深度估计方法。该方法通过改进扩散模型,实现了在保持高性能的同时提高推理效率。DepthMaster的核心创新包括Feature Alignment模块,用于增强去噪网络的语义表示能力,减少对纹理细节的过度拟合;以及Fourier Enhancement模块,通过频域操作平衡低频结构和高频细节,提升视觉质量。研究团队采用了两阶段训练策略,使模型在多个数据集上展现出卓越的泛化能力和细节保留能力,超越了其他基于扩散模型的方法。尽管取得了显著的性能提升,但团队也意识到模型参数量较大,未来将致力于通过技术优化减少模型的计算成本,以促进其在移动设备上的部署。
DepthMaster主要功能
-
单目深度估计:DepthMaster的核心功能是从单个RGB图像中估计出深度信息,为各种应用场景提供深度感知能力。
-
高性能与高效率:通过改进扩散模型,DepthMaster在保持高性能的同时显著提高了推理效率,使其更适合实际应用。
-
细节保留:该方法能够保留图像中的细粒度细节,提高了深度估计的准确性和视觉质量。
-
泛化能力:DepthMaster展现出强大的泛化能力,能够在多种不同的数据集上取得优异的性能,适应各种场景和条件。
DepthMaster技术原理
-
单步确定性范式:
-
直接预测:DepthMaster采用单步确定性范式,直接从RGB图像预测深度图,而不是通过迭代去噪过程。这种方法提高了推理速度,同时保持了与标准去噪扩散范式相当的泛化性能。
-
图像到潜在空间的转换:输入的RGB图像首先通过图像到潜在(I2L)编码器转换为潜在空间表示,然后通过去噪U-Net模型生成深度图。
-
-
Feature Alignment模块:
-
语义特征对齐:为了减少去噪网络对纹理细节的过度拟合,Feature Alignment模块引入了高质量的外部语义特征。这些特征通过预训练的外部编码器(如DINOv2)提取,并与去噪网络的特征进行对齐。
-
多层感知机(MLP):使用MLP将去噪网络的特征投影到外部编码器的特征空间,通过最小化两个特征分布之间的Kullback-Leibler(KL)散度来实现特征对齐,从而增强模型的语义表示能力。
-
-
Fourier Enhancement模块:
-
频域操作:为了提高单步模型的细节保留能力,Fourier Enhancement模块在频域中操作。该模块通过快速傅里叶变换(FFT)将特征转换到频域,然后通过一个调制器(包含卷积和激活层)自适应地平衡不同频段的信息。
-
逆变换:增强后的特征通过逆快速傅里叶变换(iFFT)转换回空间域,并与空间通道的特征进行拼接,最终通过卷积操作得到增强后的特征,从而提高深度预测的视觉质量。
-
-
两阶段训练策略:
-
第一阶段:专注于学习全局场景结构。通过在潜在空间中应用约束并结合Feature Alignment模块,增强模型的场景感知能力。
-
第二阶段:优化模型的细节保留能力。通过引入Fourier Enhancement模块和加权多方向梯度损失函数,提高边缘锐度和细节保留能力。
-
-
加权多方向梯度损失函数:
-
边缘增强:为了进一步提高深度预测的锐度,提出了一种加权多方向梯度损失函数。该函数在水平、垂直和对角方向计算梯度,并通过修改的Huber损失函数减少前景-背景交界处的大梯度差异对训练的影响,使模型能够更好地关注局部结构中的细节。
-
DepthMaster应用场景
-
自动驾驶:通过从车载摄像头的RGB图像中实时估计深度,帮助车辆感知周围环境,提高自动驾驶的安全性和可靠性。
-
虚拟现实(VR)和增强现实(AR):为虚拟场景生成逼真的深度信息,增强用户的沉浸感,提升VR/AR体验。
-
机器人导航:使机器人能够准确感知环境深度,实现自主导航和避障,适用于家庭服务机器人、工业机器人等。
-
图像合成与编辑:在图像合成中,根据深度信息进行更自然的图像融合和编辑,提升图像的视觉效果。
-
安防监控:在监控视频中实时估计深度,帮助系统更准确地识别和跟踪目标,提高安防监控的效率和准确性。
-
游戏开发:为游戏场景生成深度信息,实现更逼真的光影效果和更自然的交互体验,提升游戏的视觉质量和玩家体验。
DepthMaster项目入口
© 版权声明
文章版权归作者所有,未经允许请勿转载。

相关文章
暂无评论...










一站式AI信息服务平台:AI工具大全、AI每日快讯、AI项目库、AI融资快报、AI研究报告、AI教程、AI副业、AI考证等。助您全面系统了解AI、使用AI


 粤公网安备44011102483711号
粤公网安备44011102483711号