HoloDrive:为自动驾驶领域生成逼真的2D-3D多模态街景
HoloDrive简介
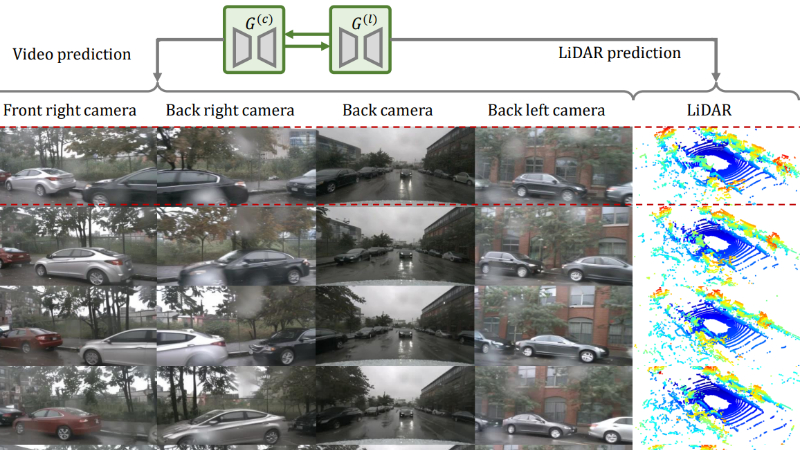
HoloDrive是由商汤、上海人工智能实验室、北京大学和清华大学的研究团队共同开发的一个创新框架,专注于为自动驾驶领域生成逼真的2D-3D多模态街景。该框架通过在相机图像和LiDAR点云之间建立高效的转换模块,实现了这两种模态的联合生成,不仅提升了生成内容的真实感和准确性,还增强了模型对环境的感知能力。HoloDrive在单帧生成和视频预测任务中均展现了卓越的性能,其生成的2D多视角街景与3D LiDAR点高度一致,为自动驾驶的模拟训练和场景测试提供了强大的支持,是目前该领域最先进的技术之一。
HoloDrive主要功能
-
多模态街景生成:联合生成多视角相机图像和LiDAR点云,为自动驾驶提供丰富的视觉和几何信息。
-
跨模态一致性:生成的2D多视角街景与3D LiDAR点高度一致,确保不同模态之间的信息匹配。
-
未来场景预测:基于历史观测数据,预测未来的街景图像和LiDAR点云,支持自动驾驶的决策和规划。
-
条件生成:根据给定的文本描述、地图布局等条件,生成符合特定场景的街景,增强生成内容的可控性。
HoloDrive技术原理
-
深度预测与空间对齐:
-
在2D生成模型中引入深度预测分支,利用3D LiDAR的自然监督,通过BEV-to-Camera和Camera-to-BEV转换模块,实现3D和2D空间的对齐。
-
-
跨模态交互模块:
-
3D-to-2D模块:将3D特征投影到2D视角视图,通过采样和加权求和,将3D信息注入2D生成模型。
-
2D-to-3D模块:将2D多视角生成模型中的语义信息聚合到3D空间,提供环境的语义先验。
-
-
时间建模:
-
通过在空间注意力层后插入时间注意力层,建模时间信息,支持多模态视频生成。
-
引入因果掩码,确保3D视频生成的因果关系。
-
-
渐进式训练:
-
分阶段训练:首先训练2D和3D单模态生成模型,然后联合训练多模态生成模型。
-
多任务学习:在联合训练阶段,通过条件丢弃策略,强制模型进行跨模态学习,提高模型的泛化能力。
-
-
条件生成与监督:
-
使用文本描述和地图布局作为条件,通过交叉注意力机制影响生成模型。
-
通过深度监督,辅助3D感知,提高生成内容的真实感和准确性。
-
HoloDrive应用场景
-
自动驾驶模拟训练:生成逼真的街景数据,用于训练自动驾驶算法,提高其在各种复杂场景下的鲁棒性和准确性。
-
虚拟环境构建:为虚拟现实(VR)和增强现实(AR)应用创建逼真的虚拟街景,增强用户体验。
-
智能交通系统测试:模拟不同的交通场景,测试智能交通系统的性能,如交通流量控制、事故预警等。
-
城市规划与设计:生成未来城市街景,帮助城市规划者和设计师评估和优化城市布局。
-
游戏开发:为开放世界游戏生成丰富的街景和环境,提升游戏的真实感和沉浸感。
-
机器人导航与交互:为机器人提供逼真的环境模拟,训练其导航和交互能力,提高在复杂环境中的适应性。
HoloDrive项目入口
- arXiv技术论文:https://arxiv.org/pdf/2412.01407
© 版权声明
文章版权归作者所有,未经允许请勿转载。

相关文章
暂无评论...










一站式AI信息服务平台:AI工具大全、AI每日快讯、AI项目库、AI融资快报、AI研究报告、AI教程、AI副业、AI考证等。助您全面系统了解AI、使用AI


 粤公网安备44011102483711号
粤公网安备44011102483711号