CityDreamer4D:南洋理工开发的无边界4D城市生成模型
CityDreamer4D简介
CityDreamer4D是由南洋理工大学S-Lab团队开发的无边界4D城市生成模型。该模型通过将动态对象(如车辆)与静态场景(如建筑和道路)分离,利用神经场技术生成背景、建筑和车辆等对象,有效解决了4D城市生成中的复杂性和多样性问题。它还引入了无边界布局生成器和交通场景生成器,分别生成静态城市布局和动态交通场景,支持大规模、多样化的4D城市生成。此外,团队还构建了包括OSM、GoogleEarth和CityTopia在内的综合数据集,为模型训练提供了丰富的语义和实例注释。CityDreamer4D在生成逼真4D城市方面表现出色,支持实例级编辑和城市风格化,为城市模拟、环境模拟和游戏开发等应用提供了新的可能性。
CityDreamer4D主要功能
-
无边界4D城市生成:生成具有无限扩展能力的4D城市,包括建筑、道路、车辆等多种城市元素。
-
动态与静态场景分离:将动态对象(如车辆)与静态场景(如建筑和道路)分离处理,提升生成的灵活性和真实感。
-
实例级编辑:支持对生成的城市中各个实例(如单个建筑或车辆)进行独立编辑,方便用户进行个性化调整。
-
城市风格化:通过引入风格代码,可以生成不同风格的城市,如赛博朋克风格或Minecraft风格。
-
城市模拟:提供高保真度的城市模拟环境,适用于自动驾驶、城市规划和虚拟现实等应用场景。
CityDreamer4D技术原理
-
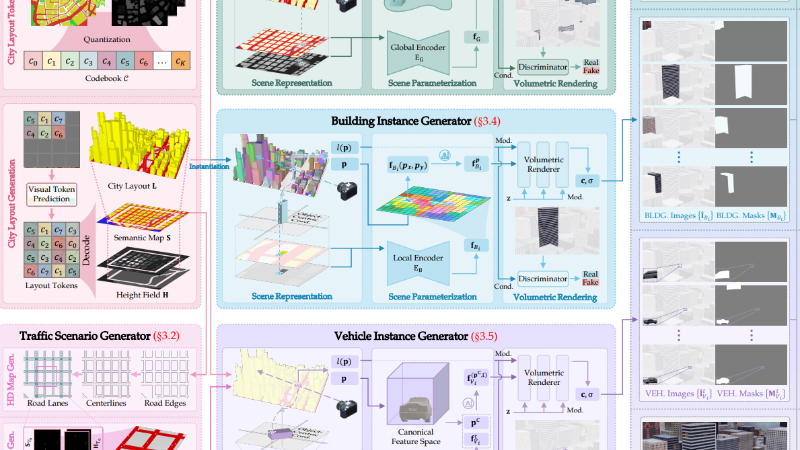
组合生成模型:使用组合生成模型,将城市生成任务分为多个模块,包括静态场景生成和动态对象生成。
-
无边界布局生成器(Unbounded Layout Generator):基于MaskGIT和VQVAE技术,生成可无限扩展的城市布局,包括语义地图和高度场。
-
交通场景生成器(Traffic Scenario Generator):生成高保真度的交通场景,定义动态对象(如车辆)的空间位置和运动轨迹。
-
神经场技术:使用生成性哈希网格和周期性位置编码来处理背景、建筑和车辆的多样性和规律性。
-
鸟瞰图表示(BEV Representation):采用鸟瞰图表示法,提高生成效率和表达能力,特别适用于无边界场景。
-
多分辨率哈希网格:使用多分辨率哈希网格进行场景参数化,捕捉多尺度特征,提升生成质量。
-
局部和全局编码器:结合局部和全局编码器,分别处理背景和实例的特征提取,确保生成结果的细节和一致性。
-
重光照和阴影映射:通过分离背景和实例生成,简化学习过程,并允许对光照和阴影进行独立处理,实现逼真的重光照效果。
CityDreamer4D应用场景
-
自动驾驶仿真:生成大规模、多样化的城市环境,用于自动驾驶算法的测试和验证,提供丰富的交通场景和道路条件。
-
城市规划与设计:帮助城市规划师快速生成不同风格和规模的城市布局,进行虚拟规划和效果评估,优化城市空间利用。
-
虚拟现实与游戏开发:为虚拟现实和游戏行业提供高保真度的城市资产,支持无缝扩展和风格化,增强沉浸感。
-
环境模拟与研究:模拟不同环境条件下的城市场景,用于气候变化研究、灾害模拟等,分析城市对环境变化的响应。
-
影视制作与特效:生成逼真的城市背景和动态场景,降低影视制作成本,提升特效的真实感和视觉效果。
-
智能交通系统:用于交通流量分析、智能交通系统的开发和测试,通过模拟不同的交通场景优化交通管理策略。
CityDreamer4D项目入口
© 版权声明
文章版权归作者所有,未经允许请勿转载。

相关文章
暂无评论...










一站式AI信息服务平台:AI工具大全、AI每日快讯、AI项目库、AI融资快报、AI研究报告、AI教程、AI副业、AI考证等。助您全面系统了解AI、使用AI


 粤公网安备44011102483711号
粤公网安备44011102483711号