HUGWBC:上海交通大学等推出的人形机器人全身控制器
HUGWBC简介
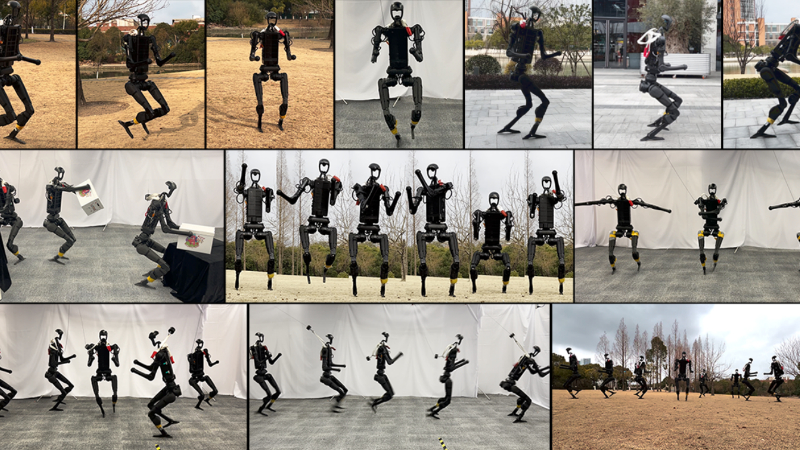
HUGWBC是由上海交通大学和上海人工智能实验室联合开发的人形机器人全身控制器。该控制器旨在实现人形机器人的精细运动控制和多功能性,通过扩展的命令空间和先进的训练技术,使机器人能够在单一策略下执行多种自然步态,如行走、跑步、跳跃、站立和单脚跳,并支持外部上肢控制器的实时干预。开发团队通过模拟训练和现实世界验证,展示了HUGWBC在高跟踪精度和鲁棒性方面的卓越性能。这一成果不仅拓展了人形机器人的运动能力,还为未来复杂任务的执行提供了新的技术基础。
HUGWBC主要功能
-
多种步态控制:HUGWBC支持多种自然步态,包括行走、跑步、跳跃、站立和单脚跳,能够根据不同任务需求进行切换。
-
精细运动参数调整:允许自定义步态参数,如步态频率、脚摆高度、身体高度、腰部旋转和身体俯仰角,以实现精细的运动控制。
-
实时外部干预支持:支持外部上肢控制器(如遥操作)的实时干预,能够在任何运动行为下保持精确控制,实现复杂的操作任务。
-
高跟踪精度和鲁棒性:在各种命令和干预下,HUGWBC展示了高跟踪精度和鲁棒性,能够适应多种复杂环境和任务需求。
-
多任务执行能力:通过统一的控制策略,HUGWBC能够在不同任务和环境中执行多种运动和操作任务,拓展了人形机器人的应用范围。
HUGWBC技术原理
-
扩展命令空间:HUGWBC通过设计一个通用的命令空间,包含任务命令(如目标速度)和行为命令(如步态频率、脚摆高度等),以实现多样化的运动控制。
-
对称性损失:利用人形机器人的对称性,通过镜像函数和对称性损失,鼓励策略生成对称且自然的运动,提升运动的优雅性和效率。
-
干预训练:在训练过程中引入随机干预,通过噪声课程策略和动作插值,使策略对外部上肢干预具有鲁棒性,确保在干预下仍能保持高精度控制。
-
强化学习:采用强化学习方法,通过构建命令跟踪问题,定义奖励函数(包括任务奖励、行为奖励和正则化奖励),训练出能够精确跟踪命令的控制策略。
-
模拟训练与现实迁移:在模拟环境中进行大规模并行训练,利用非对称训练框架和特权信息估计,解决部分可观测性问题,并将训练好的策略直接迁移到真实机器人上。
-
多层感知网络:使用多层感知网络(MLP)构建演员网络和评论家网络,通过历史状态编码器和状态估计器,处理复杂的传感器数据和命令输入,生成精确的关节动作。
HUGWBC应用场景
-
物流与仓储:在物流中心搬运货物,通过灵活的步态和上肢操作完成货物的搬运和码放。
-
家庭服务:在家庭环境中执行家务任务,如扫地、擦窗、整理物品等,适应不同的家庭布局。
-
工业巡检:在工业环境中进行设备巡检,通过灵活的运动能力进入狭窄空间,完成检查任务。
-
救援与应急响应:在灾难现场执行救援任务,如搜索被困人员、搬运救援物资等,适应复杂地形。
-
医疗辅助:在医院或康复中心辅助医护人员,帮助患者进行康复训练或搬运医疗设备。
-
教育与研究:作为科研和教育工具,用于机器人技术的研究和教学,展示先进的运动控制能力。
HUGWBC项目入口
- 项目主页:https://hugwbc.github.io/
- arXiv技术论文:https://arxiv.org/pdf/2502.03206
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章
暂无评论...










一站式AI信息服务平台:AI工具大全、AI每日快讯、AI项目库、AI融资快报、AI研究报告、AI教程、AI副业、AI考证等。助您全面系统了解AI、使用AI


 粤公网安备44011102483711号
粤公网安备44011102483711号