ENEL:新型无编码器架构的3D大型多模态模型
ENEL简介
ENEL是由西北工业大学、上海人工智能实验室、香港中文大学和清华大学的研究团队共同开发的一种新型无编码器架构的三维大型多模态模型(3D LMM)。该模型旨在克服传统基于编码器的3D LMM在处理点云分辨率变化和语义对齐方面的局限性。开发团队提出了LLM嵌入式语义编码和层次几何聚合两大策略,通过混合语义损失和几何聚合操作,使ENEL能够直接在大型语言模型(LLM)中提取高级语义和局部几何结构,无需依赖单独的3D编码器。在Objaverse等基准测试中,ENEL在3D分类、描述和视觉问答任务上展现出与现有顶尖模型相当的性能,验证了其在3D多模态理解领域的巨大潜力。
ENEL主要功能
-
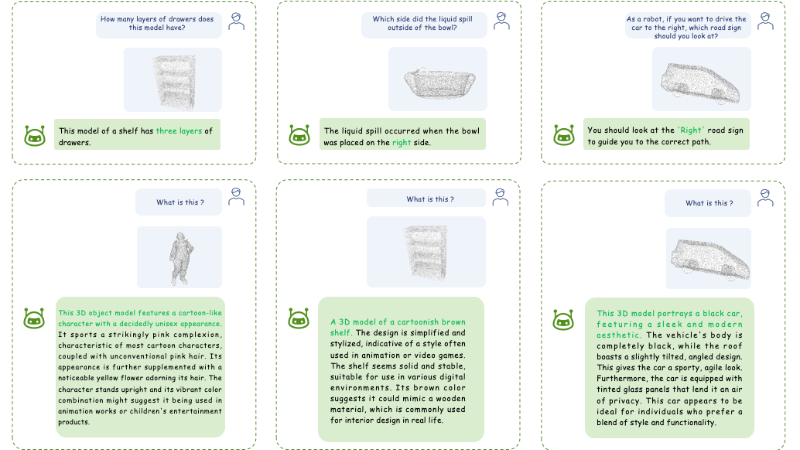
3D对象分类:
-
ENEL能够对三维点云数据进行分类,识别不同类型的3D对象。
-
在Objaverse基准测试中,ENEL在分类任务上表现优异,达到55.0%的GPT-4评分。
-
-
3D对象描述:
-
ENEL可以生成对3D对象的自然语言描述,帮助用户理解和解释复杂的3D结构。
-
在描述任务中,ENEL取得了50.92%的GPT-4评分,展示了其在语义对齐方面的强大能力。
-
-
3D视觉问答(VQA):
-
ENEL能够回答与3D对象相关的问题,支持3D视觉问答任务。
-
在3D VQA任务中,ENEL达到了42.7%的GPT-4评分,验证了其在多模态理解和推理方面的潜力。
-
ENEL技术原理
-
LLM嵌入式语义编码(LLM-embedded Semantic Encoding):
-
预训练阶段:
-
使用简单有效的令牌嵌入模块,将点云数据转换为低级令牌。
-
通过自监督学习损失(如掩码建模损失、重建损失、对比损失和知识蒸馏损失)来提取高级语义。
-
提出混合语义损失(Hybrid Semantic Loss),结合掩码建模和重建策略,以更好地嵌入语义信息。
-
-
实现效果:
-
通过将3D编码器的功能转移到LLM本身,使模型能够直接在LLM中提取高级语义和局部几何结构。
-
-
-
层次几何聚合(Hierarchical Geometry Aggregation):
-
指令调整阶段:
-
在LLM的早期层中引入几何聚合操作,通过最远点采样(FPS)和k-最近邻(k-NN)采样,对点云进行聚合和传播操作。
-
采用分层设计,使LLM能够逐步整合详细的3D语义信息,发展对3D对象的整体理解。
-
-
实现效果:
-
通过聚合和传播操作,捕获点云的局部结构细节,增强模型的几何感知能力。
-
-
-
无编码器架构(Encoder-free Architecture):
-
架构设计:
-
移除传统的3D编码器,直接在LLM中处理点云数据。
-
通过令牌嵌入模块和自监督学习损失,确保模型能够有效捕获3D点云的高级语义和几何结构。
-
-
实现效果:
-
简化了模型架构,减少了对单独3D编码器的依赖,提高了模型的灵活性和适应性。
-
-
ENEL应用场景
-
3D对象识别与分类:ENEL能够高效识别和分类各种3D对象,如家具、交通工具、机械零件等,可用于智能仓储管理、工业自动化和3D扫描设备中,快速识别和分类物体。
-
智能建筑设计:在建筑设计中,ENEL可以分析建筑模型的3D结构,自动生成设计说明或优化建议,辅助建筑师进行方案设计和空间规划。
-
虚拟现实与增强现实:ENEL可为VR/AR应用提供语义化的3D内容理解,帮助生成更逼真的虚拟场景,或在AR中实时解释和标注现实世界的3D物体。
-
自动驾驶与机器人导航:ENEL能够理解复杂3D环境中的物体和场景,为自动驾驶汽车和机器人提供更精准的环境感知和语义理解,支持路径规划和障碍物识别。
-
3D内容创作:在3D建模和动画制作中,ENEL可以自动生成对3D模型的描述或根据描述生成3D模型的初步设计,提高创作效率。
-
教育与培训:ENEL可用于教育领域,帮助学生理解复杂的3D几何结构和科学概念,通过生成描述或互动问答增强学习体验。
ENEL项目入口
- Github代码库:https://github.com/Ivan-Tang-3D/ENEL
- arXiv技术论文:https://arxiv.org/pdf/2502.09620
© 版权声明
文章版权归作者所有,未经允许请勿转载。

相关文章
暂无评论...










一站式AI信息服务平台:AI工具大全、AI每日快讯、AI项目库、AI融资快报、AI研究报告、AI教程、AI副业、AI考证等。助您全面系统了解AI、使用AI


 粤公网安备44011102483711号
粤公网安备44011102483711号