DynamicCity:卡内基梅隆大学等推出的4D动态场景生成框架
DynamicCity简介
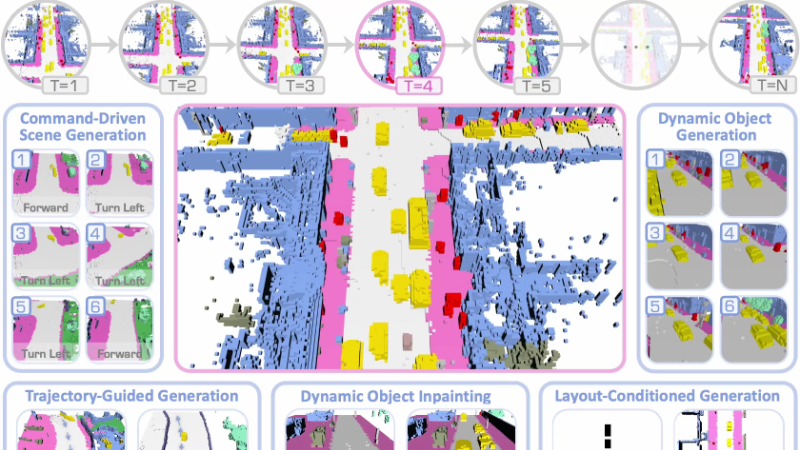
DynamicCity是由上海人工智能实验室联合卡内基梅隆大学、新加坡国立大学和南洋理工大学S-Lab团队共同开发的4D LiDAR场景生成框架。该框架专注于生成大规模、高质量且动态的LiDAR场景,能够捕捉真实世界驾驶环境中随时间演变的动态特性。DynamicCity通过创新的变分自编码器(VAE)和基于扩散变换器(DiT)的模型,实现了从紧凑的HexPlane表示中高效重建和生成4D场景。它不仅在重建和生成任务上显著优于现有方法,还支持多种下游应用,如轨迹引导、命令驱动的场景生成和动态场景修复等。DynamicCity的开发为自动驾驶、机器人技术以及虚拟现实等领域提供了强大的工具,推动了动态场景生成技术的发展。
DynamicCity主要功能
-
大规模4D LiDAR场景生成:DynamicCity能够生成大规模、高质量的4D LiDAR场景,捕捉真实世界驾驶环境中随时间演变的动态特性。
-
多种下游应用支持:支持轨迹引导、命令驱动的场景生成、布局条件生成和动态场景修复等多种应用。
-
高效4D表示和重建:通过HexPlane表示和扩展与压缩策略(ESS),实现高效的4D场景重建。
-
条件生成:支持通过条件注入实现多种4D生成应用,如命令驱动和轨迹引导的生成。
-
动态场景修复:能够对动态场景进行修复和编辑,生成合理的场景变化。
DynamicCity技术原理
-
变分自编码器(VAE):
-
HexPlane表示:将4D LiDAR场景编码为六个2D特征图(HexPlane),包括空间特征平面和时空特征平面。
-
投影模块(Projection Module):使用基于变压器的操作将4D特征压缩为2D特征图,显著提高HexPlane的拟合质量。
-
扩展与压缩策略(ESS):并行重建3D特征体积,提高训练效率和重建精度。
-
-
扩散变换器(DiT):
-
HexPlane生成:使用DiT框架生成HexPlane,实现4D LiDAR场景的生成。
-
填充展开操作(Padded Rollout Operation, PRO):将六个特征平面重新组织为一个正方形2D特征图,以便更好地建模空间和时间关系。
-
条件注入:通过Classifier-Free Guidance(CFG)实现条件生成,支持多种条件如命令、轨迹和布局等。
-
-
实验与评估:
-
数据集:使用CarlaSC、Occ3D-Waymo和Occ3D-nuScenes数据集进行训练和评估。
-
评估指标:使用mIoU评估VAE的重建结果,使用Inception Score(IS)、FID、KID、Precision和Recall评估DiT的生成结果。
-
DynamicCity应用场景
-
自动驾驶仿真与测试:生成多样化的动态交通场景,用于自动驾驶系统的仿真测试,提升系统的鲁棒性和安全性。
-
虚拟现实与增强现实:创建逼真的3D动态环境,用于虚拟现实(VR)和增强现实(AR)应用,如驾驶培训、城市规划展示等。
-
智能交通系统:模拟复杂的城市交通场景,帮助优化交通流量管理和智能交通系统的设计。
-
机器人导航与环境感知:为机器人提供动态环境的模拟数据,用于导航、避障和环境感知算法的开发与测试。
-
城市规划与建筑设计:生成大规模的动态城市场景,辅助城市规划和建筑设计,展示未来城市的发展和变化。
-
游戏开发与影视制作:为游戏开发和影视特效提供逼真的动态场景,提升视觉效果和用户体验。
DynamicCity项目入口
- 项目主页:https://dynamic-city.github.io/
- GitHub代码库:https://github.com/3DTopia/DynamicCity
- arXiv技术论文:https://arxiv.org/pdf/2410.18084
© 版权声明
文章版权归作者所有,未经允许请勿转载。

相关文章
暂无评论...










一站式AI信息服务平台:AI工具大全、AI每日快讯、AI项目库、AI融资快报、AI研究报告、AI教程、AI副业、AI考证等。助您全面系统了解AI、使用AI


 粤公网安备44011102483711号
粤公网安备44011102483711号