GaussianCity:南洋理工大学推出的3D城市生成框架
GaussianCity简介
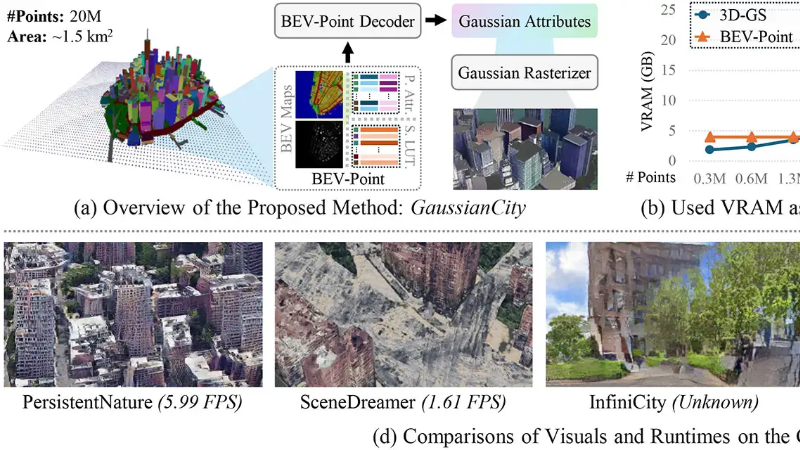
GaussianCity是由南洋理工大学S-Lab团队开发的一种创新的3D城市生成框架,专门用于高效生成无边界(unbounded)的3D城市场景。该框架基于3D高斯绘制技术(3D Gaussian Splatting),通过引入紧凑的BEV-Point表示法和空间感知的BEV-Point解码器,有效解决了传统方法在大规模场景生成中的显存和效率问题。与现有方法相比,GaussianCity不仅显著提升了生成速度(相比CityDreamer快60倍),还在无人机视角和街景视角的3D城市生成任务中展现了卓越的视觉质量和多视图一致性。这一成果为3D城市建模和虚拟场景生成提供了新的高效解决方案,具有广泛的应用前景。
GaussianCity主要功能
-
高效无边界3D城市生成:GaussianCity能够生成无限规模的3D城市场景,支持从无人机视角到街景视角的多样化视图,满足游戏、动画、虚拟现实等领域的广泛应用需求。
-
实时渲染与高效性能:通过优化的3D高斯绘制技术,GaussianCity在生成高质量3D城市时表现出色,渲染速度比现有方法(如CityDreamer)快60倍,达到10.72 FPS,显著提升了实时性。
-
低显存与存储需求:采用紧凑的BEV-Point表示法,大幅降低了显存(VRAM)和文件存储需求,即使在大规模场景下也能保持恒定的显存占用,解决了传统方法因显存不足导致的扩展性问题。
-
风格化与可编辑性:支持对建筑风格的灵活编辑和插值,用户可以通过调整风格代码轻松实现建筑外观的多样化,同时兼容主流3D引擎(如Unreal Engine)的光照效果,进一步提升视觉表现。
GaussianCity技术原理
-
紧凑的3D场景表示(BEV-Point)
-
原理:引入鸟瞰图(BEV)点作为中间表示,将高斯属性分解为位置相关和风格相关两部分。位置属性通过BEV图表示,风格属性通过查找表压缩,仅处理可见的BEV点,确保显存占用与场景规模无关。
-
作用:解决了大规模场景生成中的显存瓶颈,使无边界城市生成成为可能。
-
-
空间感知的BEV-Point解码器
-
原理:通过点序列化器(Point Serializer)和点变换器(Point Transformer),捕捉BEV点的结构和上下文特征,生成3D高斯属性。
-
作用:保留了点云的空间结构信息,提升了生成图像的质量和一致性。
-
-
3D高斯绘制(3D-GS)技术
-
原理:利用3D高斯分布表示场景,每个高斯分布包含位置、颜色、不透明度等属性,通过GPU加速的光栅化技术进行高效渲染。
-
作用:相比传统方法(如NeRF),显著提升了渲染速度,同时保持了高质量的视觉效果。
-
-
优化的训练与生成流程
-
原理:结合L1损失、VGG损失和GAN损失进行混合优化,通过多视图监督训练生成器和判别器,确保生成场景的多视图一致性和真实感。
-
作用:在保证生成质量的同时,提升了模型的训练稳定性和收敛速度。
-
GaussianCity应用场景
-
游戏开发:快速生成大规模、多样化的虚拟城市环境,为游戏开发者提供丰富的背景资源,降低开发成本和时间。
-
虚拟现实(VR)与增强现实(AR):实时渲染逼真的3D城市场景,增强用户沉浸感,适用于虚拟旅游、城市规划展示等应用。
-
影视制作:为电影和动画制作提供高质量的虚拟城市背景,支持快速生成和风格化编辑,满足不同场景需求。
-
城市规划与建筑设计:生成大规模城市模型,用于城市规划、建筑设计的可视化展示和方案评估,帮助专业人士快速呈现创意。
-
自动驾驶仿真:创建逼真的街景和城市环境,用于自动驾驶系统的测试和训练,模拟复杂的交通场景和道路条件。
-
地理信息系统(GIS):结合地理数据生成虚拟城市地图,用于地理信息的可视化和分析,支持城市研究和资源管理。
GaussianCity项目入口
- GitHub代码库:https://github.com/hzxie/GaussianCity
- HuggingFace:https://huggingface.co/spaces/hzxie/gaussian-city
- arXiv技术论文:https://arxiv.org/pdf/2406.06526
© 版权声明
文章版权归作者所有,未经允许请勿转载。

相关文章
暂无评论...










一站式AI信息服务平台:AI工具大全、AI每日快讯、AI项目库、AI融资快报、AI研究报告、AI教程、AI副业、AI考证等。助您全面系统了解AI、使用AI


 粤公网安备44011102483711号
粤公网安备44011102483711号