BEHAVIOR Robot Suite:李飞飞团队推出的综合性机器人框架
BEHAVIOR Robot Suite简介
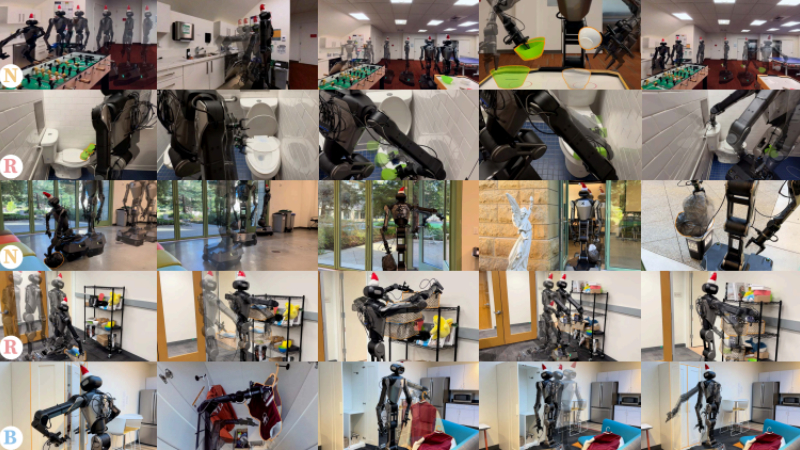
BEHAVIOR Robot Suite(BRS)是由斯坦福大学李飞飞团队开发的一个综合性机器人框架,旨在实现家庭环境中全身操作任务的高效执行。该团队通过分析家庭活动需求,提出了双手协调、稳定导航和末端执行器广泛可达性三大关键能力,并设计了BRS框架来解决这些挑战。BRS集成了一个双臂轮式机器人平台,配备4自由度的躯干,以及一个低成本的全身遥操作接口JoyLo,用于高效数据收集。此外,团队还开发了Whole-Body VisuoMotor Attention(WB-VIMA)策略,这是一种基于Transformer的模仿学习算法,能够学习协调全身动作。通过这些创新,BRS在多个家庭任务中表现出色,为机器人在日常生活中的应用迈出了重要一步。
BEHAVIOR Robot Suite主要功能
-
全身操作能力:BRS能够执行复杂的家庭任务,如双手协调操作、在复杂环境中稳定导航以及对不同高度和位置的物体进行操作。
-
高效数据收集:通过低成本的全身遥操作接口JoyLo,BRS能够快速收集高质量的全身操作数据,支持学习算法的训练。
-
复杂任务学习:BRS利用Whole-Body VisuoMotor Attention(WB-VIMA)策略,能够学习并执行长视野、多阶段的家庭任务,如清理房间、清洁马桶、将垃圾带到户外等。
-
安全性和可靠性:BRS在执行任务时表现出极低的安全违规率,能够避免与环境的碰撞,并在复杂环境中安全操作。
-
泛化能力:BRS能够在不同环境中完成任务,支持对不同物体和场景的泛化。
BEHAVIOR Robot Suite技术原理
-
硬件系统:
-
双臂轮式机器人:配备4自由度的躯干,能够实现全身操作。
-
全身遥操作接口JoyLo:通过3D打印的双臂和低成本的Dynamixel电机实现,支持用户高效控制机器人全身动作。
-
-
数据收集:
-
高效的遥操作:JoyLo通过直接控制关节,避免了逆运动学求解的复杂性,提高了数据收集的效率和质量。
-
多模态数据融合:在数据收集过程中,BRS融合了视觉、深度图像、点云、关节状态等多种模态的数据。
-
-
学习算法:
-
WB-VIMA策略:基于Transformer架构,通过自回归的方式对全身动作进行去噪,动态聚合多模态观测数据。
-
自注意力机制:利用因果自注意力机制,有效提取任务相关特征,提高策略的泛化能力。
-
层次化动作预测:通过模拟机器人身体的层次结构,预测全身动作时考虑各关节之间的依赖性,提高了动作的协调性。
-
-
任务执行:
-
长视野任务规划:BRS能够通过学习算法理解任务的阶段性,从而在复杂环境中完成多阶段任务。
-
实时控制与反馈:在任务执行过程中,BRS能够实时感知环境变化,并根据反馈调整动作,确保任务的顺利完成。
-
BEHAVIOR Robot Suite应用场景
-
家庭清洁:清理房间、收拾餐具、整理桌面等。
-
卫生间清洁:清洁马桶、擦拭洗手台等。
-
垃圾处理:将垃圾袋带到户外并投放到垃圾桶。
-
物品整理:将物品放置到高处的架子或柜子里。
-
衣物整理:从衣柜中取出衣物并放置到床上或沙发上。
-
厨房操作:打开冰箱、取出物品、清理厨房台面等。
BEHAVIOR Robot Suite项目入口
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章
暂无评论...










一站式AI信息服务平台:AI工具大全、AI每日快讯、AI项目库、AI融资快报、AI研究报告、AI教程、AI副业、AI考证等。助您全面系统了解AI、使用AI


 粤公网安备44011102483711号
粤公网安备44011102483711号