SpatialLM:群核科技开源的用于空间理解的三维大型语言模型
SpatialLM简介
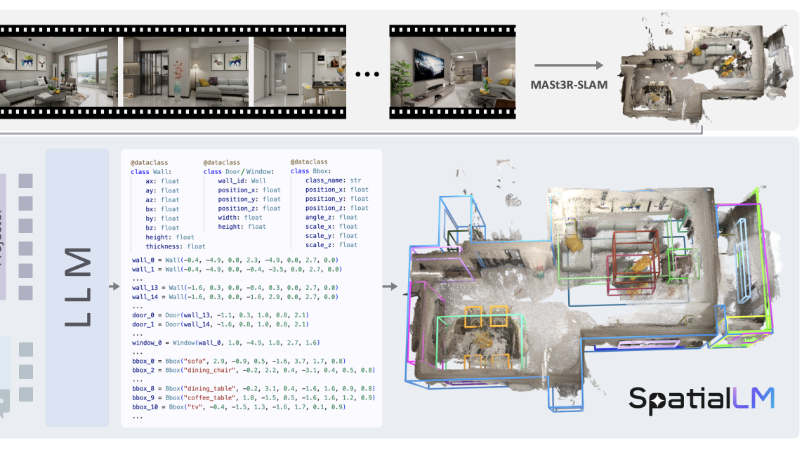
SpatialLM是由群核科技开源的一个用于空间理解的三维大型语言模型。它能够处理来自单目视频、RGBD图像和激光雷达传感器等多种来源的三维点云数据,并生成结构化的三维场景理解输出,包括墙体、门窗、物体边界框及其语义类别。该模型通过多模态架构有效弥合了无结构三维几何数据与结构化三维表示之间的差距,为机器人导航、自主驾驶等复杂三维场景分析任务提供了强大的空间推理能力。开发团队还提供了详细的安装指南和预处理的测试数据集,方便研究人员和开发者快速上手并评估模型性能。
SpatialLM主要功能
-
多源数据兼容:SpatialLM能够处理多种来源的三维点云数据,包括单目视频、RGBD图像和激光雷达传感器等,具有很强的通用性。
-
结构化场景理解:它能够生成结构化的三维场景理解输出,例如墙体、门窗、物体边界框及其语义类别,为场景分析提供详细的语义信息。
-
提升空间推理能力:通过将三维几何数据转化为结构化表示,SpatialLM能够增强机器人、自动驾驶等应用中的空间推理能力。
-
跨平台应用:其输出格式灵活,支持多种行业标准格式,便于在不同平台上使用。
-
任务扩展性:SpatialLM不仅适用于当前的任务,还具备扩展到更多复杂场景分析任务的潜力,例如与人类交互或赋能智能体执行任务。
SpatialLM技术原理
-
点云重建:首先,SpatialLM将输入的RGB视频等数据通过SLAM技术重建为三维点云,为后续处理提供基础数据。
-
特征编码:通过点云编码器,将复杂的点云数据转化为紧凑的特征表示,提取关键信息,为后续处理提供高效的数据格式。
-
场景代码生成:利用大型语言模型(LLM)的强大生成能力,将编码后的特征转化为描述场景的代码,实现从几何数据到语义描述的转换。
-
布局转换:将生成的场景代码进一步转换为具体的三维结构化布局,例如墙体、门窗等元素的精确位置和形状,完成从代码到实际场景的映射。
-
多模态融合:SpatialLM通过多模态架构,将非结构化的三维几何数据与结构化的三维表示相结合,有效弥合了两者之间的差距,为复杂场景分析提供了强大的技术支持。
SpatialLM应用场景
-
机器人自主导航:帮助机器人理解周围环境的三维结构,从而更精准地规划路径,避开障碍物,完成复杂任务。
-
自动驾驶辅助:通过处理车辆传感器数据,为自动驾驶系统提供更准确的环境感知,提升安全性。
-
建筑设计与规划:将二维图纸或点云数据转化为三维空间布局,辅助设计师进行建筑设计和室内规划。
-
虚拟现实(VR)和增强现实(AR):为VR和AR应用提供逼真的三维场景,增强用户体验。
-
工业检测与优化:分析工业场景中的三维数据,帮助检测设备故障、优化生产流程。
-
教育与研究:作为工具用于三维空间研究,或在教育中帮助学生直观理解空间结构和几何概念。
SpatialLM项目入口
© 版权声明
文章版权归作者所有,未经允许请勿转载。

相关文章
暂无评论...










一站式AI信息服务平台:AI工具大全、AI每日快讯、AI项目库、AI融资快报、AI研究报告、AI教程、AI副业、AI考证等。助您全面系统了解AI、使用AI


 粤公网安备44011102483711号
粤公网安备44011102483711号