DUSt3R项目介绍
DUSt3R是一种突破性的3D视觉重建技术,由Naver Labs Europe的研究团队开发,它允许用户无需依赖相机校准参数,直接从任意图像集合中进行密集的立体3D重建。这一方法通过创新的点图回归策略,统一了单目和双目视觉的重建过程,并在多个3D视觉任务上实现了性能的新标准,极大地简化了3D场景理解和重建的复杂性。
DUSt3R主要功能
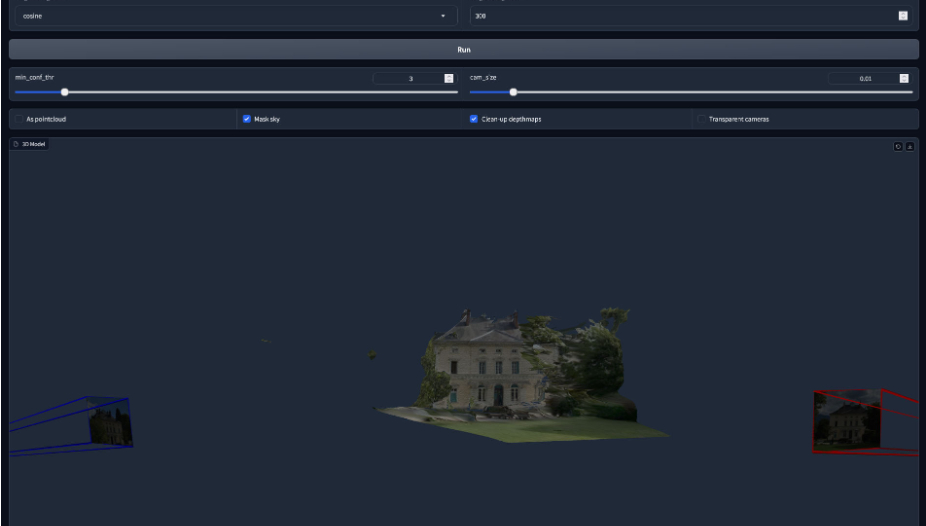
❶3D模型和深度信息生成:直接从图像对中生成3D模型和深度信息。
❷像素匹配和相机参数恢复:从预测的点图中恢复像素匹配和相对及绝对相机参数。
❸多视图深度估计:对多个视角的图像进行深度估计,并将结果聚合以生成更加一致和详细的3D表示。
❹全局场景重建:通过全局对齐策略,实现整个场景的3D重建,生成空间上一致的点云。
❺单目和多视图重建统一:DUSt3R能够处理单个图像的单目重建,也能处理多个图像的多视图重建。
❻性能新标准:在多个3D视觉任务上设定了新的性能标准,包括单目深度估计、多视图深度估计和相对姿态估计。
❼灵活性和泛化能力:由于不依赖于具体的相机模型和校准信息,DUSt3R在不同的数据集和现实世界场景中展现出良好的泛化能力。
❽数据驱动的方法:通过从大量数据中学习,DUSt3R能够捕捉和利用丰富的几何和形状先验知识。
DUSt3R应用场景
❶增强现实(AR):为AR应用提供精确的3D环境重建,增强虚拟内容与现实世界的交互。
❷建筑可视化:在建筑设计和房地产领域,用于创建房屋和建筑的3D模型,提供更加直观的展示和规划。
❸机器人导航:在机器人技术中,帮助机器人更好地理解和导航其所处的3D空间。
❹文化遗产记录:对历史遗迹和文化遗址进行3D扫描和数字化,以便于记录、研究和保护。
❺自动驾驶汽车:辅助自动驾驶汽车的视觉感知系统,提高对周围环境的理解和决策能力。
DUSt3R技术原理
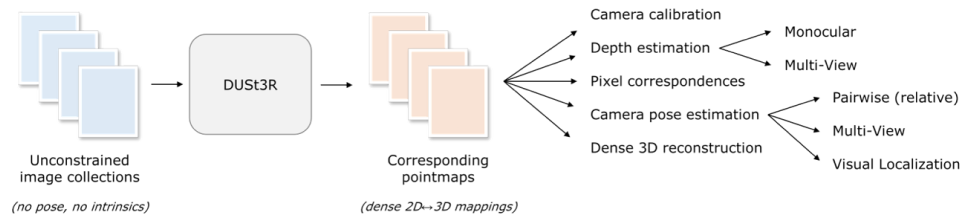
❶点图回归:DUSt3R将立体3D重建问题转化为点图的回归问题,通过预测点图来代替传统的相机模型约束,从而简化了3D重建过程。
❷Transformer架构:利用标准的Transformer编码器和解码器作为网络的基础架构,这允许模型利用预训练模型的强大能力。
❸全局对齐策略:当处理超过两幅图像时,DUSt3R采用一个简单而有效的全局对齐策略,将所有成对点图表达在一个共同的参考框架中。
❹无约束操作:不需要关于相机校准或视点姿态的先验信息,使得DUSt3R能够处理任意图像集合。
❺端到端学习:通过全监督的方式进行训练,使用简单的回归损失函数,同时学习深度信息和相关的几何量。
❻信心感知损失:DUSt3R联合学习预测每个像素的深度和置信度,以表示网络对预测的确定性。
DUSt3R项目入口
- 官方项目主页:https://dust3r.europe.naverlabs.com/
- GitHub代码库:https://github.com/naver/dust3r
- arXiv研究论文:https://arxiv.org/abs/2312.14132

相关文章












 粤公网安备44011102483711号
粤公网安备44011102483711号