SAM-Graph:基于多视图信息的3D实例分割框架
SAM-Graph简介
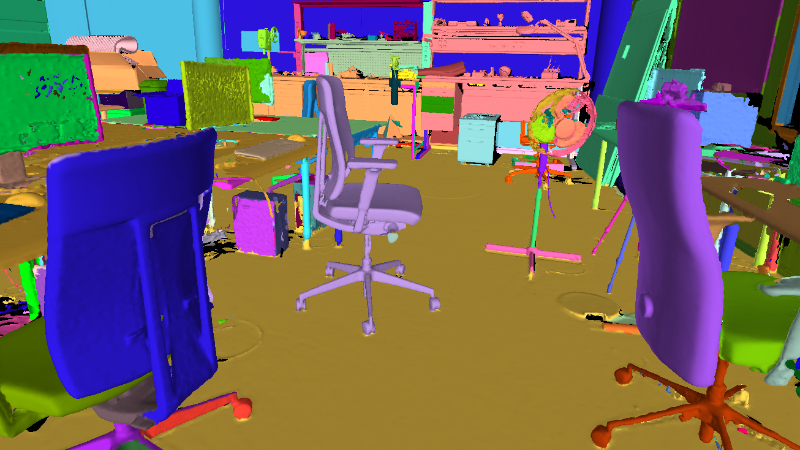
SAM-Graph是一种创新的3D实例分割方法,由浙江大学、北京师范大学、蚂蚁集团和深圳大学的联合研究团队开发。该方法通过结合3D几何信息和多视图图像数据,利用一种新颖的3D到2D查询框架,显著提升了场景的分割性能和泛化能力。通过预分割3D场景为超点,并构建基于这些超点的图结构,SAM-Graph将分割任务转化为图切割问题,并通过图神经网络进行处理,实现对复杂3D场景的精确理解和分析。
SAM-Graph主要功能
- 3D实例分割:能够识别并区分三维空间中的各个独立对象实例。
- 跨场景泛化:在不同来源和类型的数据集上保持分割性能,不受特定场景限制。
- 无需手动标注:能够利用现有的2D图像分割模型生成伪3D标签,无需手动进行3D场景标注。
SAM-Graph技术原理
- 3D到2D查询框架:创新性地将3D分割任务转化为2D分割任务,通过查询2D分割模型来辅助3D分割。
- 超点图构建:将3D场景预分割成超点,并构建超点图,将分割问题转化为图切割问题。
- 多视图图像特征融合:结合多个视角的图像特征,为超点图的节点提供丰富的特征信息。
- 图神经网络应用:使用图神经网络处理超点图,学习节点间的亲和性,进行图的分割。
- SAM提示机制:利用SAM模型的提示机制,预测多视图下的掩模,用于计算图的边权。
- 边权和节点特征计算:基于多视图掩模的交集比计算边权,使用多视图特征聚合作为节点特征。
- 伪3D标签生成策略:开发策略从2D分割结果生成用于训练GNN的伪3D标签。
- 无监督训练方法:通过伪标签和正则化损失,实现无需真实3D标注的模型训练。
- 实验验证:通过在多个标准数据集上的实验,验证方法的有效性和鲁棒性。
SAM-Graph应用场景
- 机器人导航:在仓库或家庭环境中,机器人利用3D实例分割来识别和避开障碍物。
- 自动驾驶汽车:对周围环境进行3D实例分割,以识别行人、车辆,确保行驶安全。
- 虚拟现实体验:在VR环境中,通过3D分割技术增强用户沉浸感,提供交互式体验。
- 城市场景分析:对城市建筑和道路进行3D分割,辅助城市规划和交通管理。
- 室内装修设计:帮助设计师在室内空间中进行3D分割,以规划家具布局和装饰元素。
- 安全监控系统:在监控视频中实现3D实例分割,用于检测异常活动或潜在安全威胁。
SAM-Graph项目入口
- 官方项目主页:https://zju3dv.github.io/sam_graph/
- GitHub代码库:https://github.com/zju3dv/SAM-Graph
- arXiv研究论文:https://arxiv.org/abs/2312.08372
© 版权声明
文章版权归作者所有,未经允许请勿转载。

相关文章
暂无评论...










一站式AI信息服务平台:AI工具大全、AI每日快讯、AI项目库、AI融资快报、AI研究报告、AI教程、AI副业、AI考证等。助您全面系统了解AI、使用AI


 粤公网安备44011102483711号
粤公网安备44011102483711号